HDR
HDR
Research
Research
HDR
Research
Robotic Assembly: Triangle
Robotic Assembly: Triangle
Automated robotic assembly systems for constructing modular triangular timber structures
Automated robotic assembly systems for constructing modular triangular timber structures
Automated robotic assembly systems for constructing modular triangular timber structures
Robotic Arm Programming
Rhino/Grasshopper
CAD
CNC Manufacturing
Robotic Arm Programming
Rhino/Grasshopper
CAD
CNC Manufacturing
Questions
Questions
How can the optimization of triangular patterns in timber structures maximize spatial efficiency while enabling robotic assembly processes?
How can the optimization of triangular patterns in timber structures maximize spatial efficiency while enabling robotic assembly processes?
How can the optimization of triangular patterns in timber structures maximize spatial efficiency while enabling robotic assembly processes?
Solution
Solution
Optimizing Spatial Tessellation Through Automated Construction
Optimizing Spatial Tessellation Through Automated Construction
Optimizing Spatial Tessellation Through Automated Construction
This research investigates the optimization of triangular timber structures through computational design and robotic assembly. The methodology combines parametric modeling for spatial efficiency analysis with automated fabrication processes. Through prototyping, the study validates both geometric arrangements and assembly sequences, establishing metrics for pattern density and construction efficiency. The findings demonstrate how integrated design approaches can enhance both spatial utilization and assembly automation in timber construction systems.
This research investigates the optimization of triangular timber structures through computational design and robotic assembly. The methodology combines parametric modeling for spatial efficiency analysis with automated fabrication processes. Through prototyping, the study validates both geometric arrangements and assembly sequences, establishing metrics for pattern density and construction efficiency. The findings demonstrate how integrated design approaches can enhance both spatial utilization and assembly automation in timber construction systems.
Triangular Lattice
Triangular Lattice
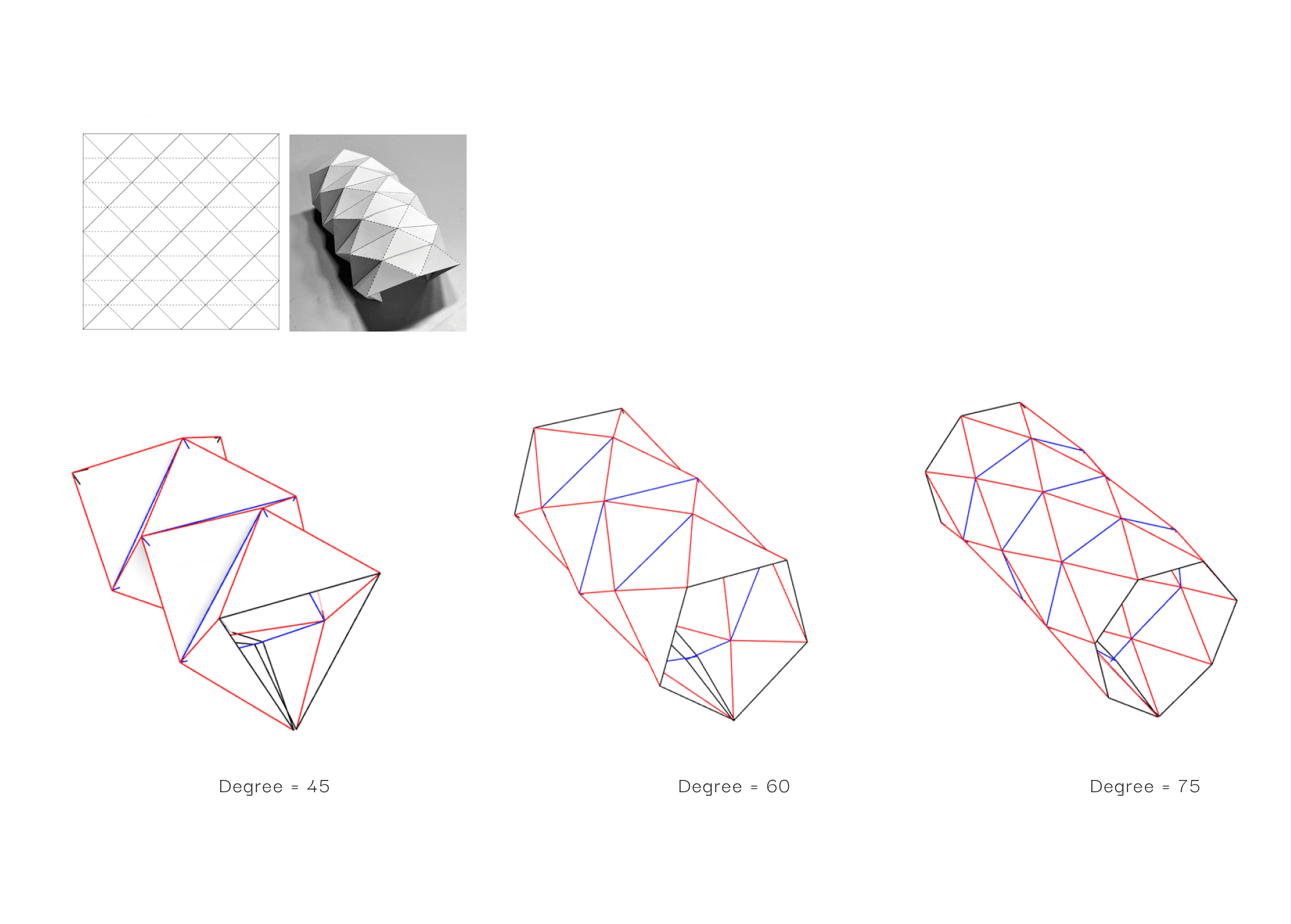
Through parametric manipulation of triangular lattice angles at 45, 60, and 75 degrees, the research investigates how varying geometric configurations impact spatial efficiency and structural performance in timber assemblies.
Through parametric manipulation of triangular lattice angles at 45, 60, and 75 degrees, the research investigates how varying geometric configurations impact spatial efficiency and structural performance in timber assemblies.

Waterbomb Structure ‘Hedgehog’
Waterbomb Structure ‘Hedgehog’
The research explores parametric variations of the waterbomb tessellation pattern, translating its folded geometry into manufacturable timber components through digitally-driven fabrication and robotic assembly processes.
The research explores parametric variations of the waterbomb tessellation pattern, translating its folded geometry into manufacturable timber components through digitally-driven fabrication and robotic assembly processes.

Digital Assembly Testing
Digital Assembly Testing
Parametric simulations test diverse triangular folding patterns to visualize spatial configurations and assembly sequences before physical fabrication.
Parametric simulations test diverse triangular folding patterns to visualize spatial configurations and assembly sequences before physical fabrication.
Joint Design Development
Joint Design Development
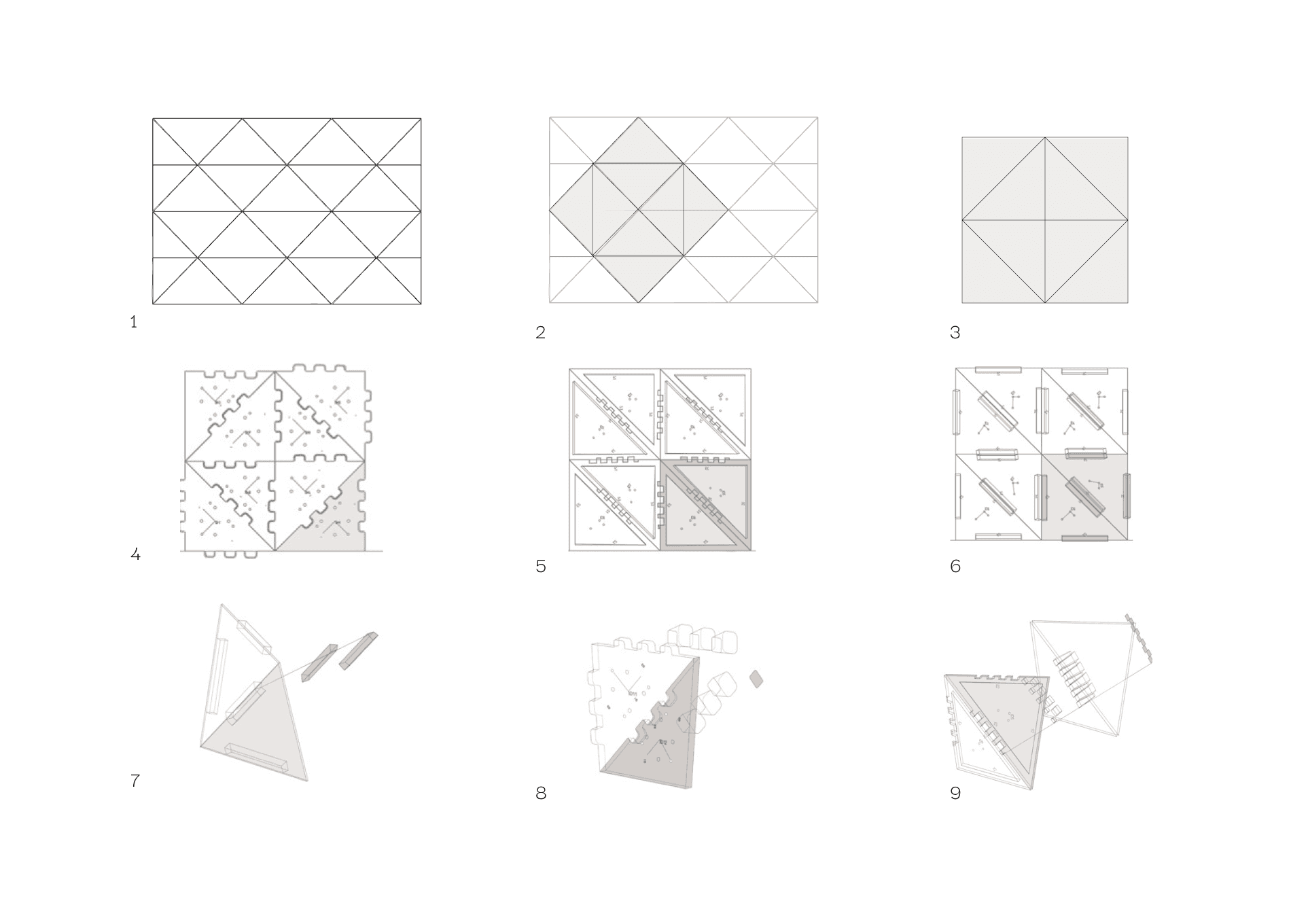
Different joint configurations are explored through iterative prototypes, ranging from basic triangular tessellations to detailed interlocking mechanisms for automated timber assembly.
Different joint configurations are explored through iterative prototypes, ranging from basic triangular tessellations to detailed interlocking mechanisms for automated timber assembly.
Physical Prototyping
Physical Prototyping
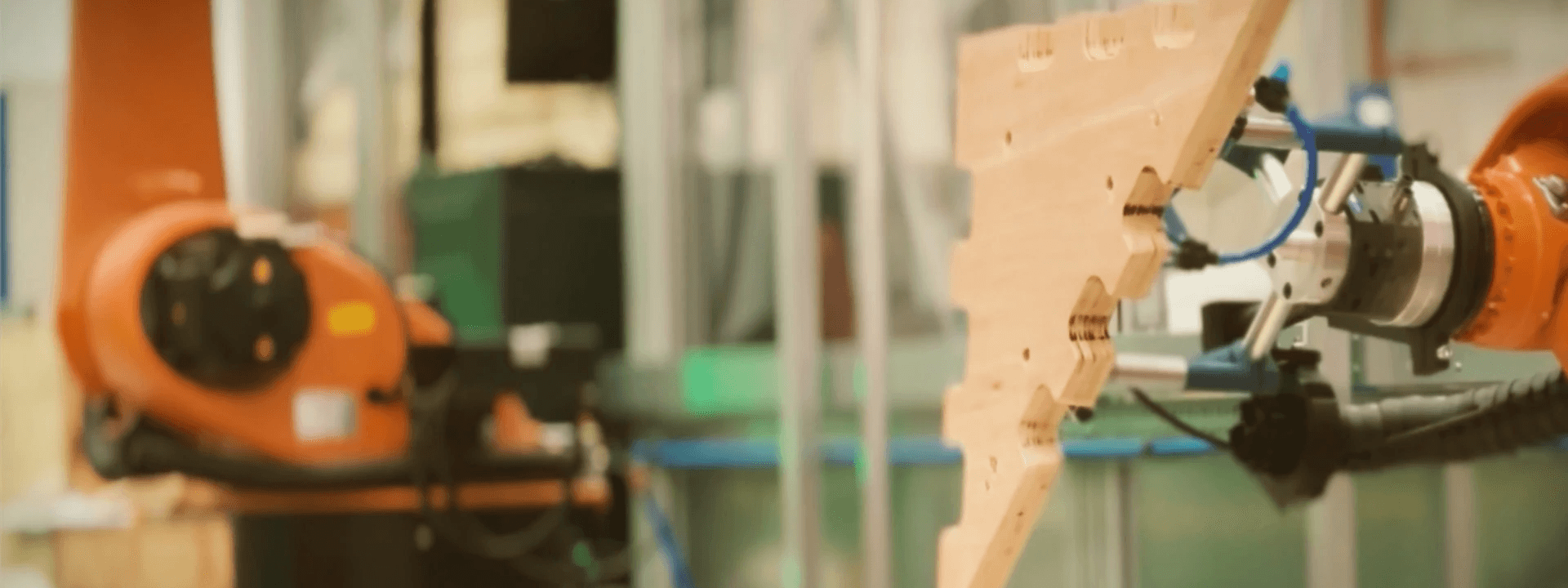
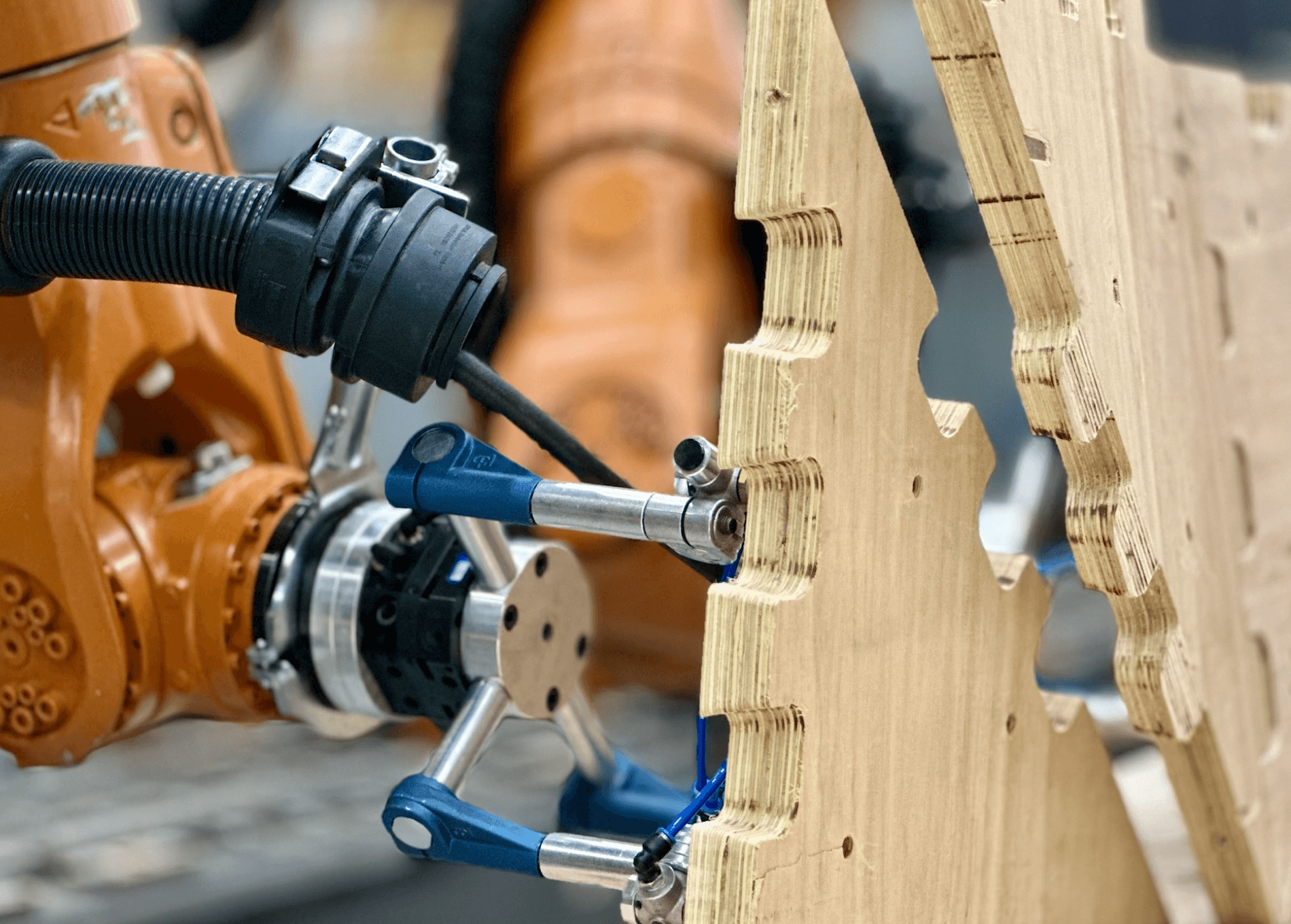
Custom robotic end-effectors engage with precisely milled timber components to test the feasibility of automated assembly systems.
Custom robotic end-effectors engage with precisely milled timber components to test the feasibility of automated assembly systems.
Data
Data
15 min
15 min
Average assembly time per component
Average assembly time per component
1 mm
1 mm
1 mm
Fabrication tolerance achieved through CNC milling
Fabrication tolerance achieved through CNC milling